Key points from article :
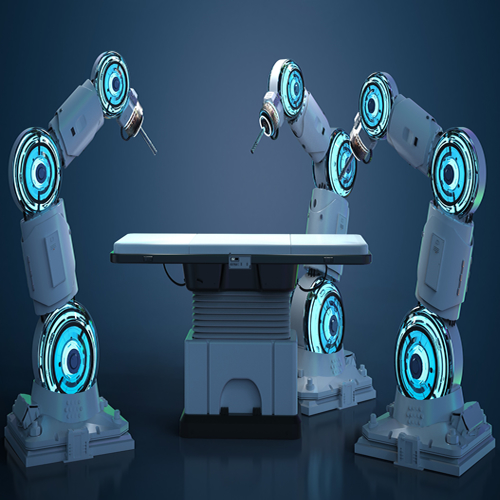
Conventional surgical robots based on structures made from rigid components which only move in straight lines.
Stiffness controllable Flexible and Learnable manipulator for surgical operations (STIFF-FLOP) robot enables elongation and bending in all directions.
Mimics an octopus’ ability to move its tentacles, enabling the robot to squeeze through narrow openings and past delicate organs without damaging them.
Team used the robot to operate on human cadavers as well as medical manikins.